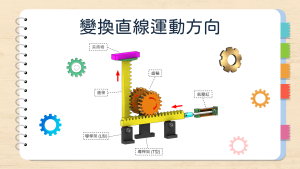
以曲柄及肘節取代凸輪功能,達成肘節在行程終點的運動狀態由減速至停止。
內容目錄
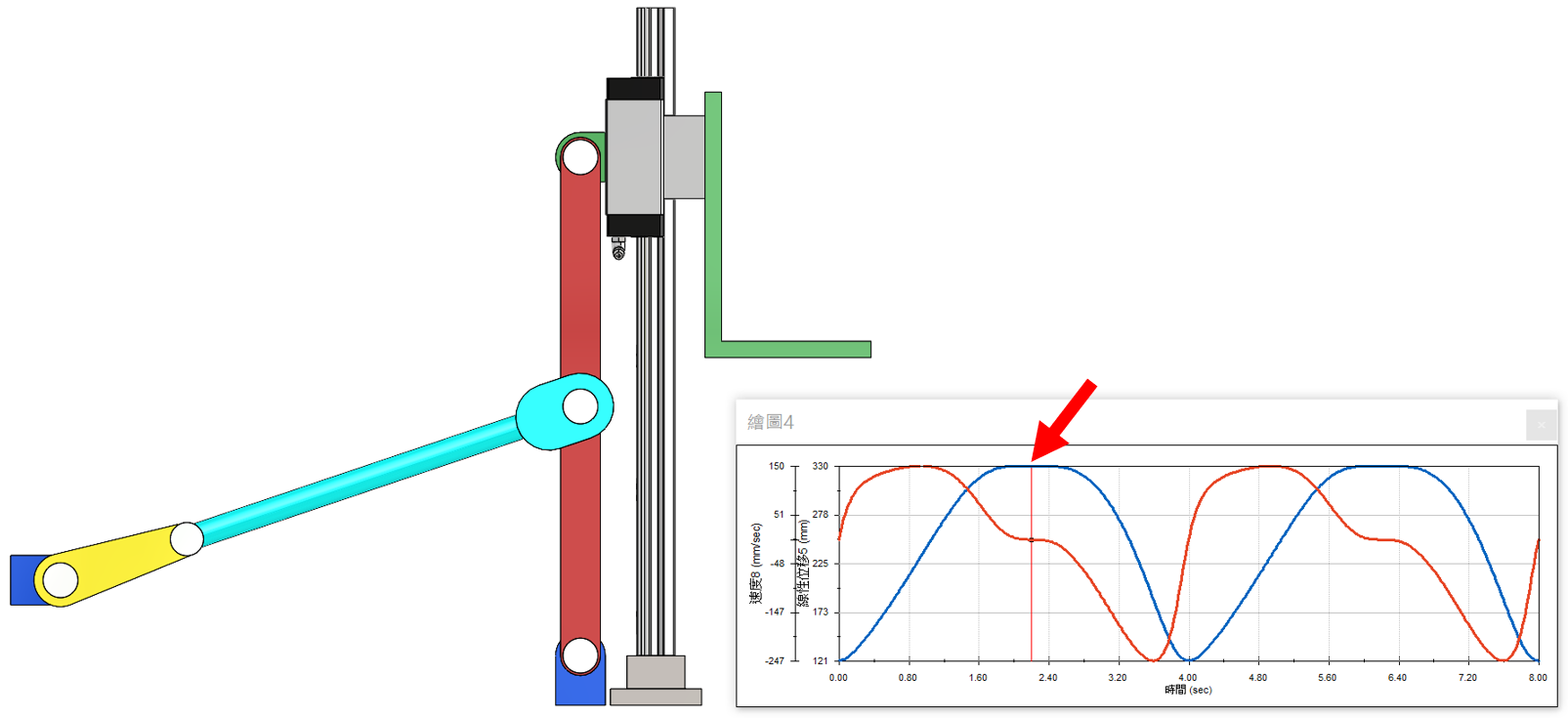
1. 機構運動影片
2. 為什麼不使用凸輪
由表格綜合比較,可看出肘節的優點多於凸輪,舉例來說,連桿可使用成本較低的材料,但也可依需求改為不鏽鋼,用於室外或具有腐蝕性環境,相對於凸輪,業界一般多採用材料為低碳合金結構鋼(SCM415),相比之下就顯得較無彈性。
| 條件 | 肘節連桿 | 凸輪元件 |
|---|---|---|
| 一致的夾持點 | 優勢 | 侷限 |
| 厚度可變性 | 侷限 | 優勢 |
| 成本 | 低 | 高 |
| 快速運動 | 較快 | 較慢 |
| 不鏽鋼材料 | 優勢 | 侷限 |
3. 什麼是肘節機構?
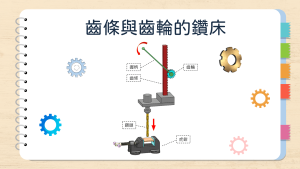
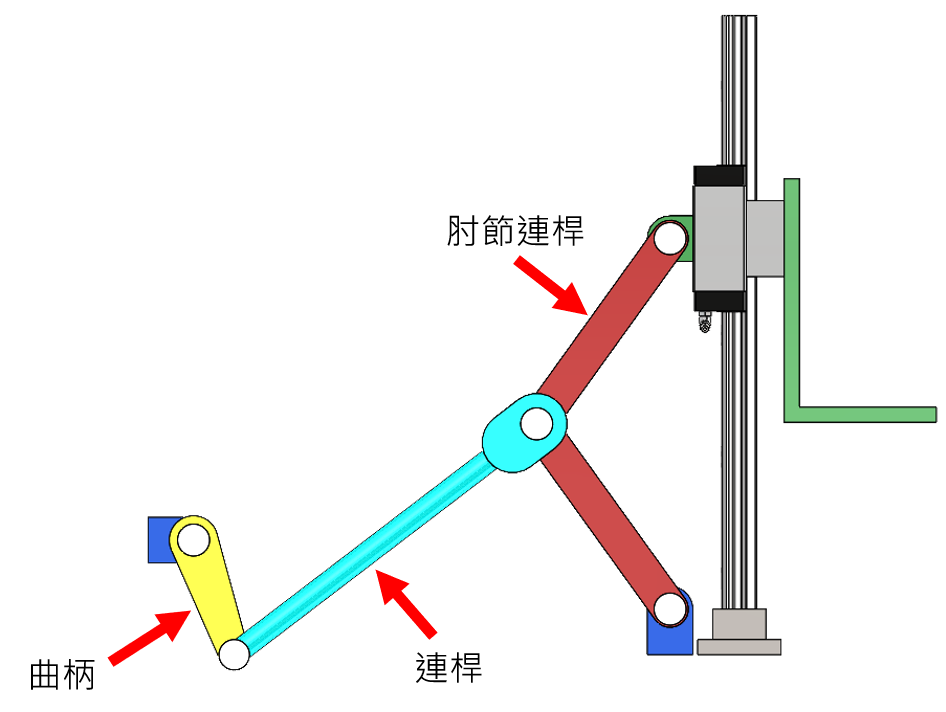
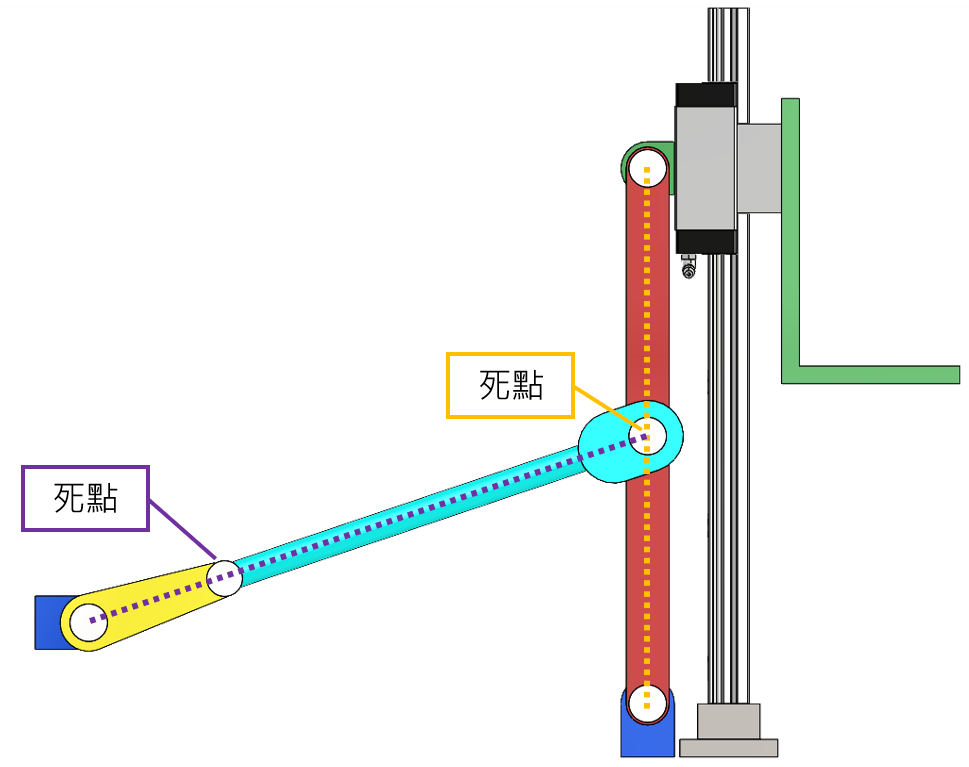
肘節機構(Toggle Mechanism),以2個連桿組成,當運動過程連桿形成一直線時,會產生相當大的力,這時稱為死點(dead center position)。常用於沖孔機、碎石機、手夾鉗…等。
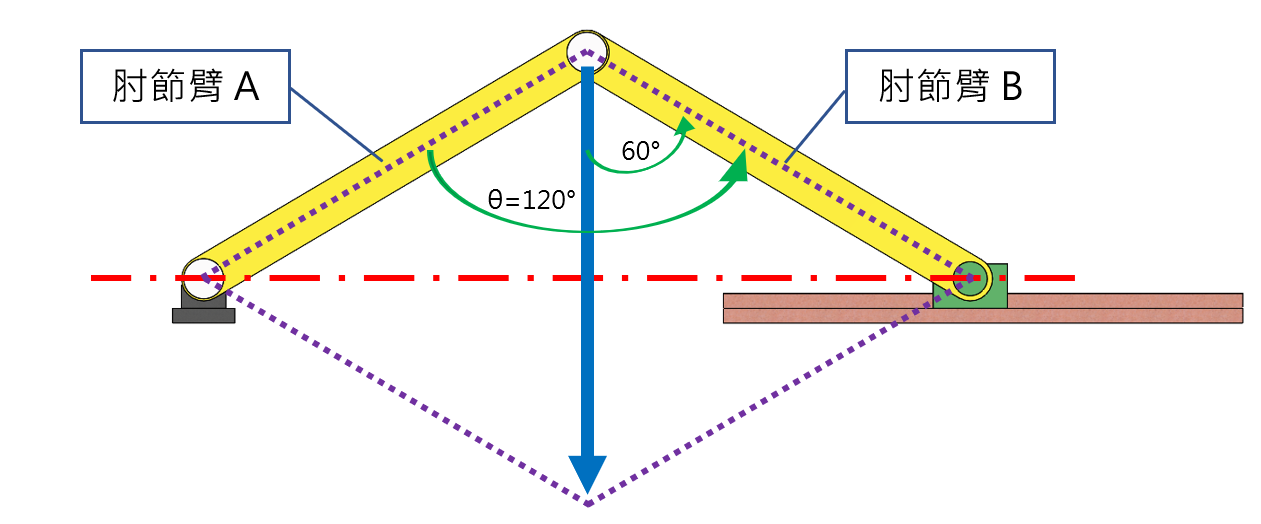
3-1. 增力特性
當肘節連桿夾角為120度時,動力輸入和輸出比大約為 1 : 1,例如 : 輸入力 9 kg,當角度為150度時,就有2倍力道約18公斤。
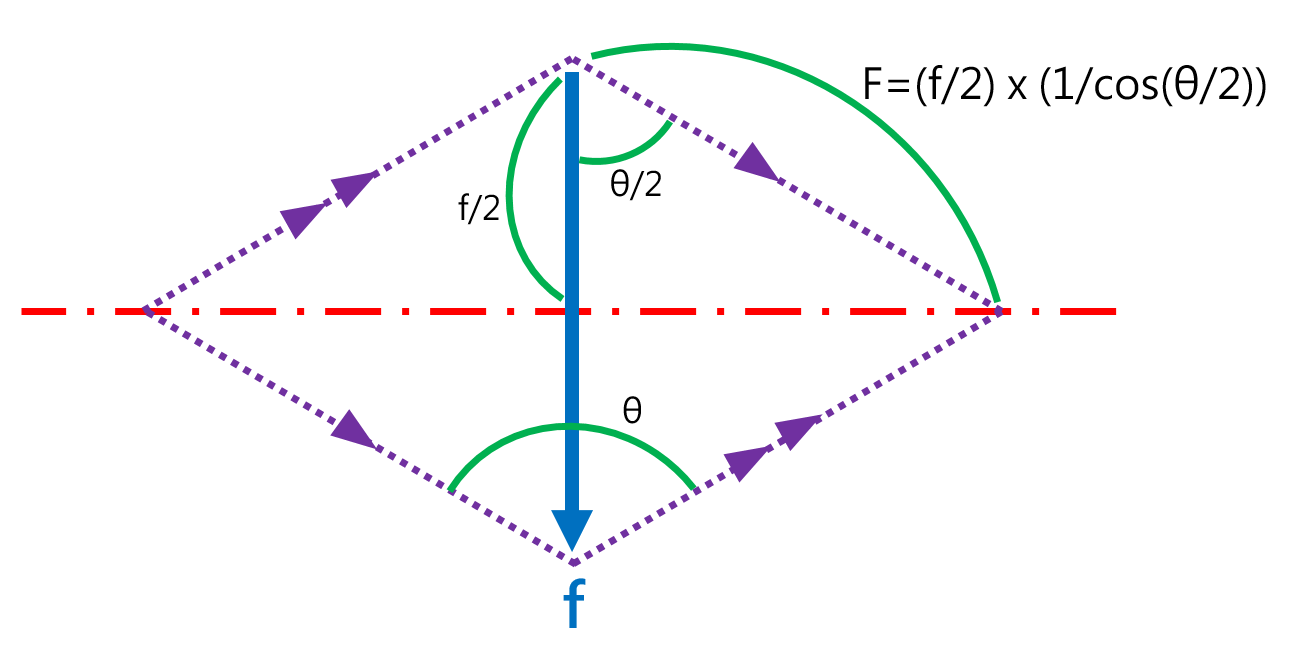
3-2. 概算倍率表
由圖推導出連桿力(F)的公式為 (f/2) x (1/cos(θ/2)),表格紀錄當肘節角度於80°~179.5°間,連桿輸出的動力,仔細查看發現,當肘節角度不到120°時,輸出的力道會變小不足1倍,設計時最好避免此情況。
| θ | F/f | 概算倍率 | | | θ | F/f | 概算倍率 |
|---|---|---|---|---|---|---|
| 80° | 0.65 | 0.65 倍 | | | 170° | 5.73 | 5 倍 |
| 90° | 0.71 | 0.7 倍 | | | 175° | 11.46 | 10 倍 |
| 100° | 0.78 | 0.8 倍 | | | 176° | 14.32 | 15 倍 |
| 120° | 1.00 | 1 倍 | | | 177° | 19.10 | 20 倍 |
| 140° | 1.46 | 1.5 倍 | | | 178° | 28.65 | 30 倍 |
| 150° | 1.93 | 2 倍 | | | 179° | 57.29 | 50 倍 |
| 160° | 2.88 | 3 倍 | | | 179.5° | 114.59 | 120 倍 |
3. 如何設定曲柄固定點
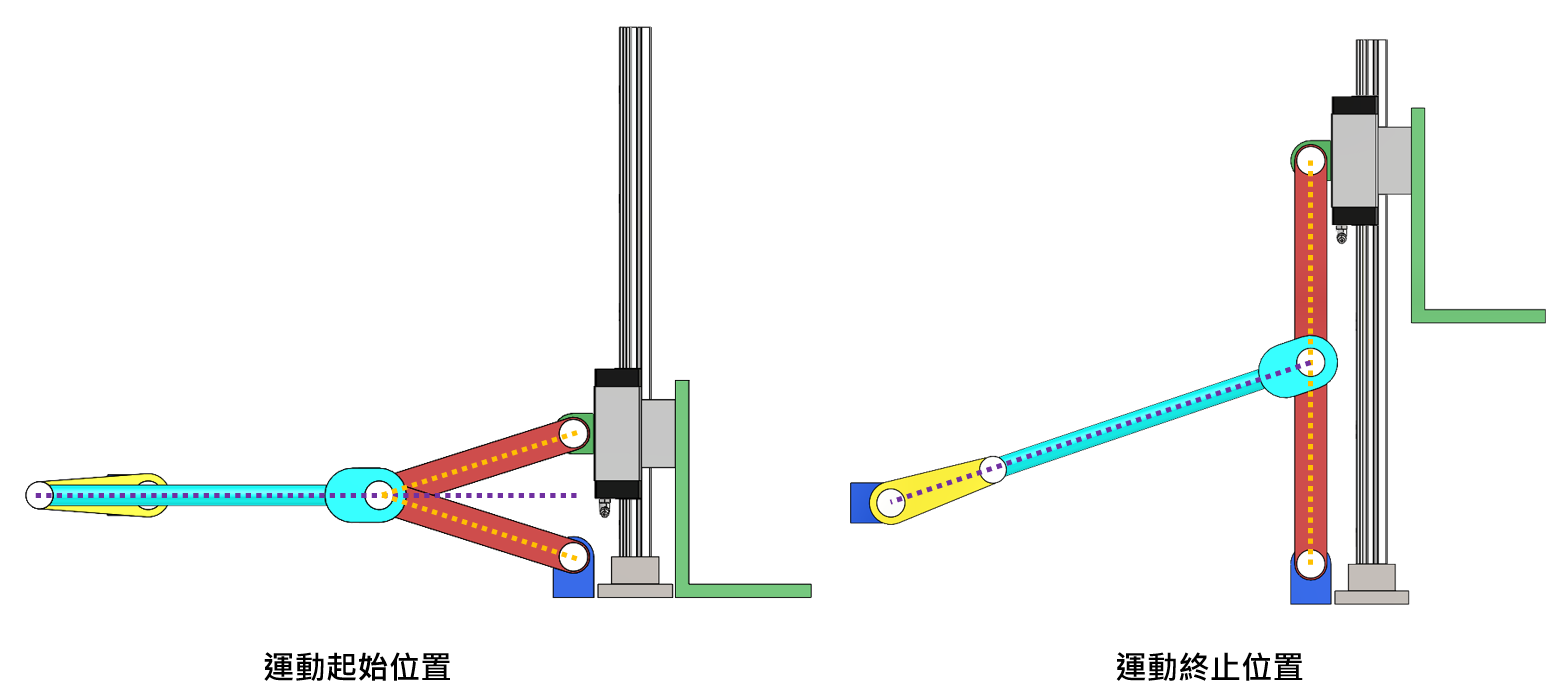
設計肘節機構時,先規劃模型運動的起始及終止位置,接著並設計模型在這兩狀態時,連桿分別的位置為何,例如 : 運動終止時,兩肘節連桿互為180度(共線)、曲柄及連桿也為180度(共線),如右圖;運動起始時,曲柄及連桿同樣互為180度(共線),兩肘節以連桿為對稱線,如左圖。
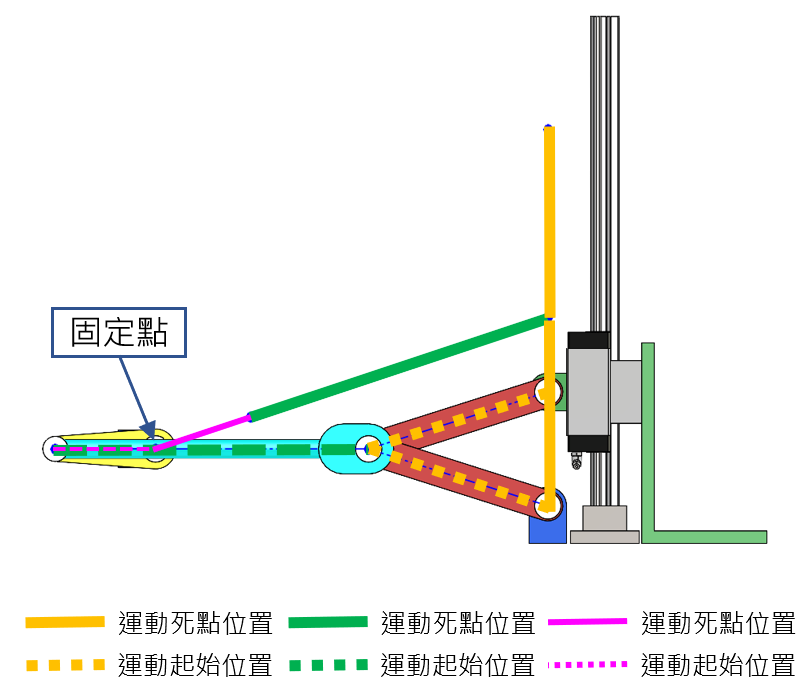
最快速的方法為,在草圖以直線取代連桿,使用共線限制條件定義兩種運動狀態的連桿位置,這時固定點就會出來了。
4. 推薦書籍